
A body is said to be a Rigid Body when it has a perfectly definite shape and size. The distance between all pairs of particles of such a body do not change while applying any force on it.
Example:- A wheel can be considered as Rigid Body by ignoring a little change in its shape.
Kinds Of Motion Of A Rigid Body
A rigid body can posses pure translational motion, pure rotational motion or a combination of both these motions.
Pure Translational Motion
A motion in which every particles of the body moves through the same linear distance in a straight line and in a given time interval is known as a pure translational motion.
In pure translational motion, at any instant of time, all particles of the body have the same velocity. In pure translational motion, at any instant of time all the particles of the body are moving along parallel paths.

Rotational Motion
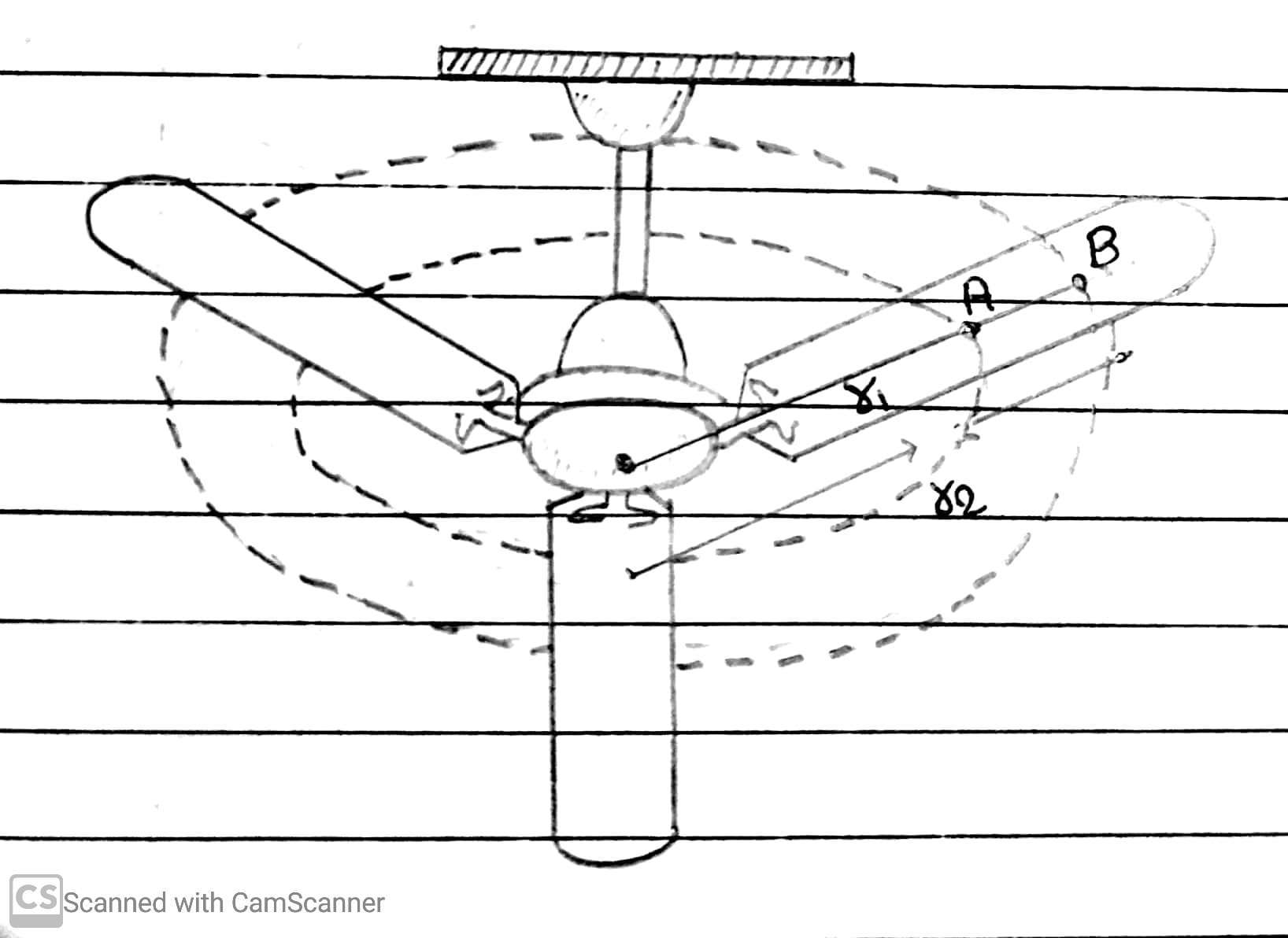
In pure rotational motion, every particle of the rigid body moves in a circle of different Radii about a fixed line, which is known as axis of rotation.
Example:- An oscillating fan, when the fan rotates, all the particles revolves in a circle with different radius.
Precession
In precision one end of axis of rotation is fixed and other end rotates about a circular path.
Example:- (I) The point of contact of the top with ground is fixed. The axis of rotation of the top at any instant passes through the point of contact.
(II) Oscillating table fan is also an example of precession.
Combination Of Translational and Rotational Motion
A Rigid Body may have a rolling motion, which is a combination of rotation and translation.
Example:- A cylinder rolling down an inclined plane, its motion is a combination of rotation about a fixed axis and translation.
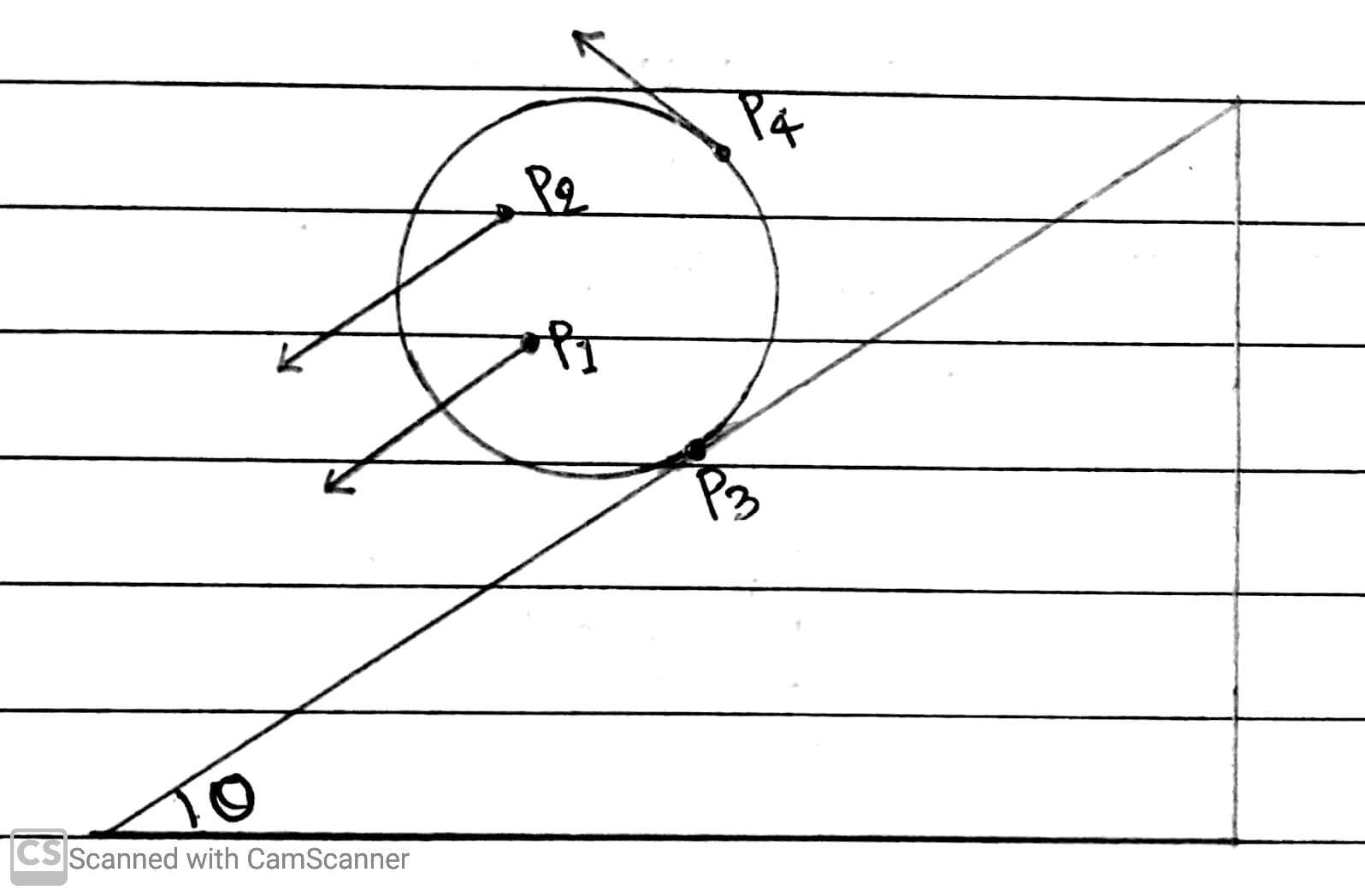
When the cylinder shifts from top to bottom, the points P₁, P₂, P₃, P₄ on this cylinder have different velocities at a particular instant of time. But if the cylinder were to rolls without slipping, the velocity of point of contact P₃ would be zero at any instant of time.
* Baseball bat is also an example of combination of these two motions.
Must Read
NCERT Class 11 Physics Book PDF Free Download
Also Read
SL Arora Class 11 Physics Book PDF Free Download
All In One Arihant Class 11 Physics Book PDF Free Download